Nidec Control Techniques Unidrive SP AC Variable Frequency Governor
Nidec Control Techniques Unidrive SP Advanced User Manual (11th edition) for induction motors and servo motors, covering eight core modules including parameter structure, keyboard operation, advanced parameters, macro commands, serial communication, electronic nameplate, performance indicators, and rotor flux control (RFC). It supports four operating modes: open-loop/closed-loop vector/servo/regeneration, providing 22 menu parameters, SM series expansion modules, Modbus/ANSI communication, multi-level safety permissions, and comprehensive protection diagnostics, meeting compliance requirements such as EU Machinery Directive, RoHS, REACH, WEEE, etc.
Parameter structure system
Unidrive SP adopts a hierarchical menu architecture and strictly isolates permissions:
Menu 0: Basic common parameters (up to 59 items), factory open read-write
Advanced menu (1-22): Professional functions, requiring L2 permission to unlock
Expansion Module Menu (15-17): Exclusive Parameters for SM Series Expansion Cards
Second motor parameters (Menu 21): Dual motor switching configuration
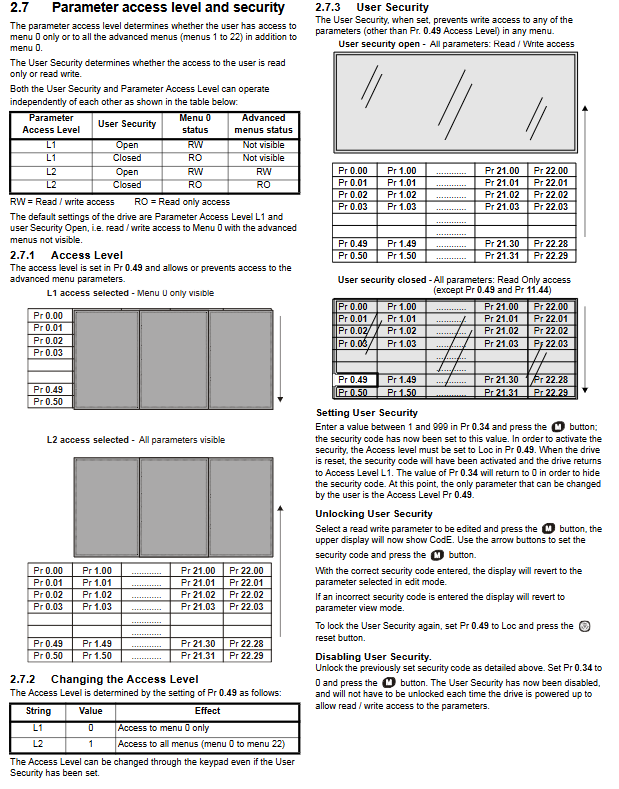
Permission level:
Level Access Range Read/Write Permissions
L1 can only read and write Menu 0
L2 All menus can be read and written
Loc All Menu Read Only (Security Lock Activated)
Keyboard and operation
Provide two types of operation keyboards:
SM Keypad: LED digital tube, basic operation
SM Keypad Plus: LCD display, supports 5 languages, help text, screen saver, hardware key
Core operating mode:
Status mode: Display rdy/run/stop/trip and other statuses
Parameter viewing mode: Browse menus and parameter values
Edit mode: Modify parameter values
Keyboard control mode: direct start stop, speed regulation
Key operations:
Reset: Red STOP key/numeric command/communication trigger
Parameter saving: Pr x.00=1000 Reset and save
Restore default: Pr x.00=1233 (standard)/1244 (American standard)
Core parameters (x.00)
All menus contain the x.00 instruction parameter, which is the debugging core:
Command value function
Save 1000 parameters to EEPROM
1233 Load Standard Default Parameters
1244 loads default parameters for American standards
2001~9999 SMARTCARD data read/write, erase, compare
12000 only displays non default parameters
12001 only displays target parameters
Advanced parameter functions (Menu1-22)
Divided by functional modularization:
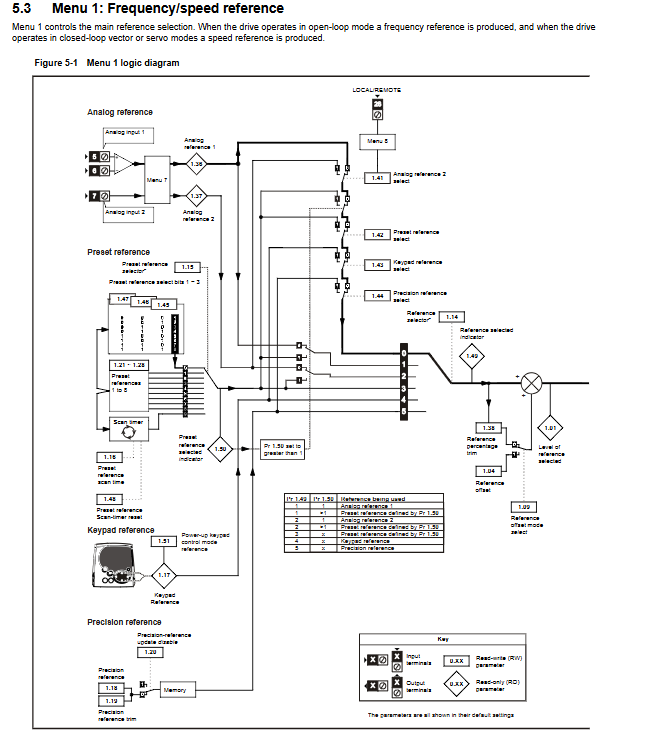
Menu 1: Speed/Frequency Reference, Limiting, Filtering, Preset Speed
Menu 2: Acceleration and deceleration ramp, S-curve, DC bus voltage stabilization and deceleration
Menu 3: Speed feedback, encoder, speed loop PID, overspeed protection
Menu 4: Torque control, current loop, current limiting
Menu 5: Motor control V/F、 Magnetic flux, automatic tuning
Menu 6: Timer, Timer, Running Logic
Menu 7: Analog I/O, Calibration, Filtering
Menu 8: Digital I/O, Logic, Terminal Configuration
Menu 9: Built in PLC and electric potentiometer
Menu 10: Status, Fault, Trip Records
Menu 11: System Settings, Version, Communication, Security
Menu 12: Threshold, variable selection, brake control
Menu 13: Position control and positioning
Menu 14: User PID Regulator
15~17. Expansion modules: Encoder I/O、 sports card
18~20. User application menu
Second motor parameters
Menu0 Extended Configuration
Operation mode
Supports four high-performance control modes:
Open loop: V/F control, sensorless
Closed loop vector: high-precision vector with encoder
Servo: Permanent magnet synchronous motor servo control
Regeneration: PWM rectification, energy feedback
Macro Instructions (Quick Debugging)
Built in 8 application macros, one click configuration:
Simple Mode
motorized potentiometer
preset speed
torque control
PID control
Axis limit control
Brake control
Digital locking
Communication Protocol
ANSI Protocol: Basic Serial Communication
Modbus RTU: Industry standard, supports 0~247 addresses and baud rates of 300~115200bps
Support register read/write, CRC check, and exception code feedback
Electronic nameplate
Supports Hiperface/EnDet encoders to store motor parameters, with bidirectional read and write capabilities, achieving plug and play functionality for motors.
Performance indicators
Digital reference: resolution 0.1Hz/0.1rpm, precision mode 0.001
Simulation reference: 12~16 bit high-precision
Speed loop bandwidth: up to several hundred Hz
Update rate: Normal 4ms, High speed mode 250 μ s
Current loop: Fast response, supports weak magnetic flux control
Rotor Flux Control (RFC)
The sensorless vector algorithm can achieve high-precision speed and torque control without the need for an encoder, and is suitable for high dynamic loads.
Protection and Alarm
Key protections: overcurrent, overvoltage, undervoltage, overload, overheating, overspeed, I/O failure, encoder error
Alarm display: br.rS, OVLd, hot, Auto tune, PLC, etc
Support automatic reset, fault recording, and trip locking
Key questions and answers
Question 1: What are the three most commonly used commands for the parameter x.00 of Unidrive SP? What functions are implemented separately?
answer:
1000: Save the modified parameters to the EEPROM of the frequency converter without losing them in case of power failure;
1233: Restore factory standard default parameters for initialization or fault reset;
12000: Only display non default parameters that have been modified, quickly locate debugging changes.
Question 2: What is the difference between keyboard permissions L1 and L2 for Unidrive SP? How to switch?
answer:
L1 (default): Only able to access basic parameters of Menu 0, unable to view advanced functions;
L2: Access to all 22 menus for professional debugging and programming.
Switching method: Set in Pr 0.49: 0=L1, 1=L2; After activating the security lock, a password is required to unlock it.
Question 3: What are the four operating modes supported by Unidrive SP? What occasions are they applicable to?
answer:
Open loop: no encoder, simple fan, water pump, conveyor belt;
Closed loop vector: with encoder, high-precision speed regulation, tension control;
Servo: permanent magnet synchronous motor, positioning, synchronization, machine tool, robot;
Regen: Energy feedback for lifting, downstream loads, and high-power energy-saving applications.