ABB NextMove ESB-2 motion controller
The official user manual for ABB NextMove ESB-2 multi axis motion controller is based on Mint programming language and supports up to 4-axis servo+4-axis stepper control. It comes standard with 2 channels of 12 bit differential analog input, 4 channels of 12 bit analog output, 20 channels of optically isolated digital input, 12 channels of digital output, 1 channel relay, 5 channels of differential encoder interface, USB/RS232/RS485/CAN communication, and achieves axis configuration, servo tuning, motion programming, and fault diagnosis through Mint WorkBench. It is suitable for industrial motion control scenarios such as high-precision point positioning, interpolation, electronic cam/gear, and flying shear, and meets CE, UL, and RoHS certifications.
Product positioning and core specifications
Basic Parameters
Parameter specifications
Control the number of axes: 4-axis servo+4-axis stepper
Power supply 24VDC ± 20%, maximum 2A/50W
Working temperature: 0~45 ℃
Size 245 × 140 × 45mm
Weight 700g
Certified CE, UL, RoHS, WEEE
Model differentiation (NSB202/203/204/205)
NSB202/204: Stepped output is differential RS422
NSB203/205: Stepped output with open collector electrode
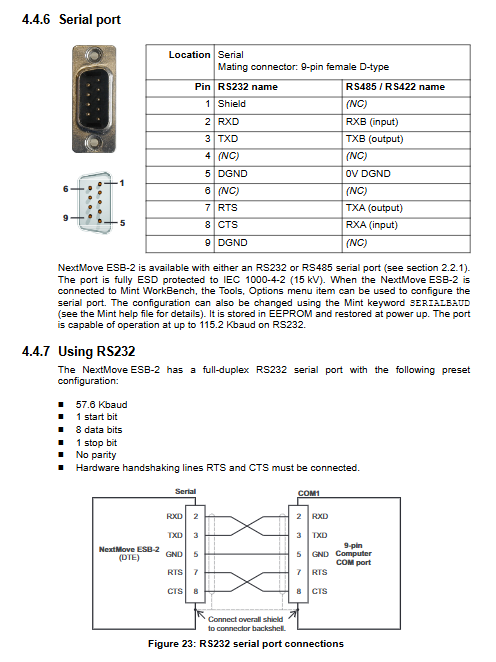
Serial port version: RS232/RS485 optional
I/O interface resources
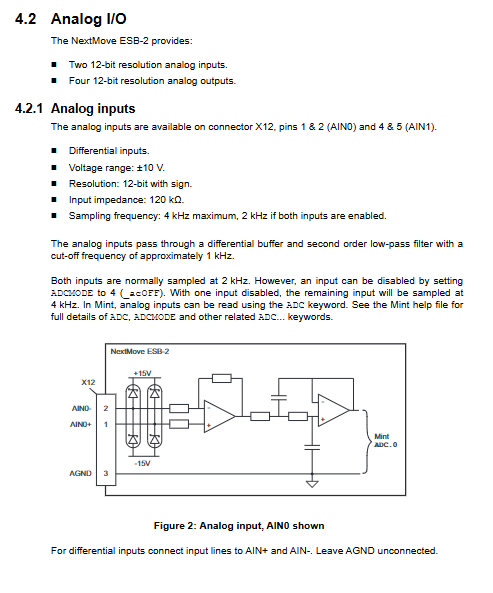
1. Analog I/O
Input: 2-channel differential, ± 10V, 12 bits, input impedance 120k Ω
Output: 4-channel bipolar, ± 10V, 12 bit, maximum 2.5mA/channel
2. Digital I/O
Input: 20 channels of optical isolation, 24VDC, can be set to level/edge trigger
DIN0~3: High speed interrupt input, response 1 μ s
DIN17~19: Can be used as an auxiliary encoder input
Output: 12 channels, total current * * ≤ 500mA * *, maximum 350mA per channel
relay: 1A@24VDC Fault safety normally closed output
3. Encoder and motion interface
Encoder: 5-way differential ENC0~4, supports A/B/Z, up to 2.5MHz
Step output: 4-axis, maximum 500kHz pulse frequency
4. Communication interface
USB 1.1: Programming and debugging, maximum 5m
RS232/RS485: baud rate 9600~115200bps
CAN: RJ45 interface, supports CANopen/Baldor CAN, baud rate 10k~1Mbps
Software and Programming
development environment
Mint WorkBench: Axis configuration, parameter tuning, programming debugging
Mint Machine Center (MMC): Network scanning, multi machine management
programming language
Mint: BASIC like structured motion language, supporting point positioning, interpolation, cam, and flying shear
Key functions
Electronic cam/gear, circular arc/spiral interpolation, multi axis synchronization, position comparison output
Axis configuration and servo tuning
1. Axis configuration process
Select axis type: servo/stepper/virtual
Set SCALEFACTOR: Pulse → User Unit (mm/°)
Configure driver enablement (IO/relay)
Save configuration to startup block
2. Servo loop gain (core)
KPROP: Proportional gain to improve response speed
KDERIV: Differential gain, vibration suppression
KINT: Integral gain, eliminating steady-state errors
KVELFF: Speed feedforward to reduce tracking error
3. Set goals
Critical damping: fast in place, no overshoot, no oscillation
Installation and wiring specifications
Installation: Vertical installation, leaving * * ≥ 20mm * * heat dissipation space around the perimeter
Grounding: single point grounding, shielded wire single end grounding
Encoder: twisted pair shielded wire, maximum length 30.5m
CAN bus: 120 Ω terminal resistors at both ends, consistent baud rate across the entire network
Fault diagnosis
Status display: 7-segment digital display shows node number/error code
Common Faults
Communication failure: Check USB/serial port driver, wiring, and address
Motor not turning: Confirm driver enable, wiring, and gain
Vibration/overshoot: reduce KPROP, increase KDERIV
Follow error: Increase KPROP/KVELFF, check encoder
Tools: SupportMe information collection, error logs, oscilloscope
Key issues
Question 1: How many servo and stepper axes does NextMove ESB-2 support? What are the core parameters of the interface between analog and encoder?
answer:
Motion axis: Supports up to 4-axis servo+4-axis stepper;
Analog quantity: 2-channel 12 bit differential input (± 10V), 4-channel 12 bit bipolar output (± 10V);
Encoder: 5-way differential RS422 interface, maximum input frequency of 2.5MHz, maximum wiring length of 30.5 meters.
Question 2: What are the functions of KPROP, KDERIV, KINT, and KVELFF in servo axis tuning? How to quickly obtain stable response?
answer:
KPROP: Improve response speed, excessive vibration;
KDERIV: Damping suppresses overshoot, and excessive response slows down;
KINT: Eliminate static errors, excessive oscillation will occur;
KVELFF: Speed feedforward to reduce tracking error in the uniform speed range.
Quick tuning: First adjust KDERIV anti vibration, then raise KPROP to just no vibration, add a small amount of KINT to eliminate the difference, and finally optimize KVELFF.
Question 3: What is the difference between DIN0~3 and regular digital input? What additional functions can DIN17-19 achieve?
answer:
DIN0~3 are high-speed hardware interrupt inputs, with a position latch response of 1 μ s, and cannot be directly connected to mechanical switches;
DIN17-19 can be configured as an auxiliary encoder input, supporting pulse+direction signals, up to 15kHz, for external spindle/spindle tracking.