TI C2000 CLA Software Development Guide
CLA Overview
CLA (Control Law Accelerator) is a 32-bit floating-point programmable hardware accelerator built into the C2000 MCU, designed specifically for high real-time control algorithms.
Core value: Running in parallel with C28x CPU, doubling equivalent computing power
Direct access to peripherals: ePWM/HRPWM, ADC, eCAP, eQEP, GPIO, SPI, etc
Advantages: Reduce interrupt latency, shorten control loop cycle, and alleviate CPU load
Introduction to Development
development tools
Main IDE: Code Composer Studio (CCS)
Compiler: C2000 code generation tool, supports CLA C language compilation
Support: MATLAB Embedded Coder automatically generates CLA code
Development steps
Learn the official CLA training manual
Run C2000Ware samples (CLAmath, driverlib)
Refer to FAQ and Debugging Tips
Reference digital power supply and other system use cases
Example Resources
Basic Mathematics Library: CLAmath Library
Device drivers: driverlib, Device_Support
Reference Design: PFC, Digital Power SDK
CLA type and device differences
CLA is divided into 3 generations, corresponding to different devices and functions:
CLA type core characteristics represent chips
Type 0 Basic Edition, Program Space 12 Bit (4KW) F2803x, F2805x, F2806x
Type 1 16 bit address space (64KW), task interruptible CPU F2807x, F2837xD/S
Type 2 supports background tasks, hardware breakpoint enhancement F28004x, F2838xD/S
Core FAQ (Key Information)
Independence: CLA has independent buses, registers, and pipelines, which can run independently without the CPU after configuration
Programmable: Fully programmable, supports C language/assembly, no fixed algorithms
data sharing
Channel: Shared RAM+Message RAM
Rule: Shared variables must be defined on the C28x end, CLA read-only/write
Message RAM: CPU → CLA (CPU write, CLA read); CLA → CPU (CLA write, CPU read)
Differences in data types
Int: CLA=32 bits, C28x=16 bits
Pointer: CLA=16 bits, C28x=32 bits, need to be aligned with CLA-FPTR consortium
task trigger
Source: Peripheral interrupts, software triggers, inter task triggers, background tasks (Type 2)
Configuration: old device MPIRCRSEL1, new device CLA1TASKSRCSELx
Task execution
Nesting is not supported (Type2 backend tasks support level 1 preemption)
End instruction: MSTOP
Program space: Type0=4096 words, Type1 and above=64K words
Interruption and synchronization
CLA can send interrupts to C28x: task completion, software forcing, floating point overflow
Resource Access: Hardware auto arbitration to avoid writing to the same register simultaneously
Mission terminated
Not running: MICLR clearing flag
Running: MCTL soft reset terminated
Debugging skills
Debugging environment
CCS simultaneously debugs C28x and CLA, sharing JTAG
Breakpoint: __mdebugsstop() built-in breakpoint instruction
Common Faults
Task not started: Check trigger source, initialization sequence, interrupt enable
Software trigger failure: Check MCTL, MIER, IACK parameters
Variable not updated:. cratchpad/. bs_cla not allocated to RAM
Task timing
Method 1: Read ePWM timer count
Method 2: Flip GPIO and measure with oscilloscope
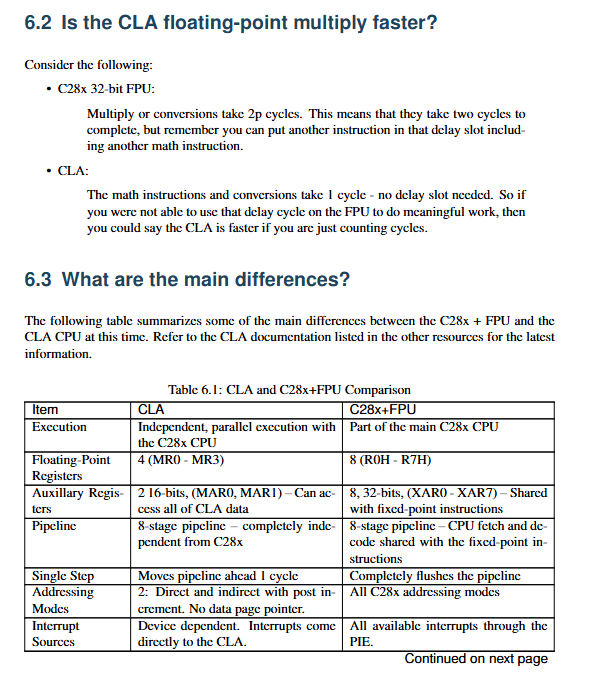
Comparison between CLA and C28x+FPU Core
Project CLA C28x+FPU
Execution mode independent parallel main CPU internal
4 floating point registers (MR0-MR3) and 8 registers (R0H-R7H)
Floating point operation, single cycle execution, 2-cycle pipeline
Pipeline independent 8-stage and fixed-point sharing
Two full mode support for addressing modes
Interrupt Nesting None (Type2 supports level 1) Supports Nesting
Memory access limited to CLA program/data/message RAM, full device memory
Single step mode, single cycle step refresh pipeline
Key issues
Question 1: How do CLA and C28x CPUs securely share data? What are the pitfalls?
Answer: Interact through shared RAM and dedicated message RAM; Shared variables must be defined on the C28x end and use a fixed width type of std int. h (such as uint322-t). The biggest pitfall is the incompatibility between int and pointer length: CLA’s int is 32-bit and the pointer is 16 bit, while C28x is the opposite. The structure pointer must be aligned with a 32-bit union, otherwise addressing errors occur.
Question 2: What are the triggering methods and execution rules for CLA tasks? What is the maximum program space?
Answer: Supports four types of triggers: external interrupt, software IACK, inter task, and background task (Type 2); Execute only one task at a time without nesting (Type2 backend can be preempted). Program space: Type0 is 4KW (approximately 2000 instructions), Type1 and above are 64KW, and tasks end with MSTOP instructions.
Question 3: What are the core advantages and limitations of CLA in control algorithms compared to C28x+FPU?
Answer: The advantages include independent parallel operations, single cycle floating-point multiplication/conversion, direct access to peripherals, lower control latency, and suitability for fast inner loop control. The limitations include fewer floating-point registers (4), simple addressing mode, no loop instructions, limited memory access, making it more suitable for lightweight real-time algorithms and not suitable for complex logic and large computational tasks.